
Bin Jiang
Centre for Advanced Spatial
Analysis, University College London, 1-19 Torrington Place, London WC1E
6BT, UK
b.jiang@ucl.ac.uk
http://www.casa.ucl.ac.uk/bin/
| Contents
1. Introduction 2. Multi-agent simulation and urban environments 3. Self-organisation and StarLogo 4. A representation of urban environments 5. Simulating pedestrian flows in a virtual urban environment 6. Conclusions and future work References |
ABSTRACT
This paper presents experiments on pedestrian flows by the
use of multi-agent simulations. A range of simulations (SimPed) have been
built up for exploring complex pedestrian behaviour in urban environments.
In this context, space syntax (Hillier and Hanson
1984) is used as an analytical tool for urban structure analysis. Based
on the structure analysis and simulations, it has been found that urban
morphological structures have striking impacts on pedestrian movement in
urban environments, which conforms to previous relevant empirical studies.
Further research is being carried out in order to refine pedestrian behaviour
in the decision of route choosing based on visibility analysis.
KEYWORDS: urban simulations, virtual environments, human behaviour, multi-agent simulations, urban morphology, GIS. |
Figure 1 The framework of VENUE project
The remainder of this paper
is organised as follows. Section 2 briefly describes the model of multi-agent
simulation and its link to urban environments. Section 3 is an overview
of StarLogo, a computational tool for exploring self-organised systems.
Section 4 introduces a representation of urban environments for urban morphological
analysis. Section 5 details experiments on pedestrian movement in a virtual
urban environment and analysis of the results. Finally section 6 summarises
conclusions and proposes future work.
2.
Multi-agent Simulation and Urban Environments
Multi-agent simulation is developed from the field of Distributed Artificial
Intelligence (DAI). The baisc idea of multi-agent simulation is that programs
exhibit behaviours entirely described by their internal mechanisms. By
linking an individual to a program, it is possible to simulate an artificial
world inhabited by interacting processes. Thus it is possible to implement
simulation by transposing the population of a real system to its artificial
counterpart. Each member of population is represented as an agent who has
built-in behaviours. Multi-agent simualtion provides a platform to model
situations in which there are large numbers of individuals and individuals
have complex behaviours.
The basic unit of a multi-agent
simulation is the agent, where an agent is any actor in a system, any entity
that can generate events that affect itself and other agents. Simulations
consist of groups of many interacting agents. For instance, any ecosystem
could consist of agents representing prey and predator respectively.
Drogoul and Ferber (1994)
have summarised multi-agent simulation as a set of the following elements:
agents, behaviours, objects, environments and communications. Four of them
are described by the quadruplet:
![]()
where agents are the set of all the simulated individuals, and behaviours
are properties of agents; objects are the set of all represented passive
entities that do not react to stimuli (e.g., buildings, street furniture
in urban environments); environments are the topological space where agents
and objects are located, where they can move and act, and where signals
(sounds, smell, etc.) propagate; and communications are the set of all
communication categories, such as voice, written materials, signs, etc.
Applying the paradigm to
urban systems, a couple of instances can be devised. Agents can be pedestrians
and vehicles; Buildings, shops and museums are objects; The physical open
spaces of the urban system can be regarded as environment; and communications
can occur either between agents or between agents and their environments.
Agents can be characterised by their behaviour in response to their environmental
conditions and their neighbouring agents status. Thus communication could
be considered in various ways, for example, a car sees another car close
ahead, it may slow down; a tourist sees a direction sign, he/she may change
their current heading. Human activities in urban environments are affected
by the urban morphological structure (through the interaction between agents
and environments) and by the status of neighbouring agents (through the
interaction between agents).
Multi-agent simulation has
advantages over traditional numerical simulation techniques, which are
based on mathematical or stochastic models, usually differential equations.
Firstly multi-agent simulation provides impressive visual display with
which users (simulation designers) can assess visually agents behaviour
in the course of simulation. Secondly, users can dynamically trace how
global structure emerge as a result of the agents individual interactions.
One can use multi-agent simulation to test hypothesis, build up theories,
and integrate different partial theories coming from various disciplines.
3.
Self-organisation and StarLogo
There have been many efforts in providing software platform for multi-agent
simulations. Swarm (Minar et al. 1996) is such
a software platform, produced by Santa
Fe Institute, for the simulation of complex adaptive systems. It is
claimed to be a system that helps scientists focus on research rather than
on tool building. In this respect, I believe that StarLogo (Resnick
1997) is exactly the kind of tool for scientists. It is developed from
Logo as a programming language for children (Papert
1980).
The idea behind StarLogo
is so-called self-organisation, i.e. organised without an organiser, and
co-ordinated without a co-ordinator. Orderly patterns can arise from location
interaction between agents, and between agents and environments. The idea
is not new as many computer models have such functions. Among others, cellular
automata (CA) is probably the most influential in this respect. In CA,
a virtual world is arranged as a grid of "cells". Each cell holds
a certain state, e.g. "alive" or "dead". Each cell is also assigned transition
rules, for example, a cell becomes "alive", if the majority of its neighbouring
cells are "alive", and in the same way a cell becomes "dead" if the majority
of neighbouring cells are "dead".
StarLogo has developed
this idea, and incorporated three main types of characters in the virtual
world: patches, turtles, and observer as in Figure 2.
Turtles are the main inhabitants of the StarLogo world. Patches are the
world in which the turtles live. Patches are arranged in a grid with the
original co-ordinate in the centre. One can specify the size of patches
and size of the environment according to the size of the turtles. If one
likes to have the agents to look relatively realistic, then large patches
are desirable. StarLogo can be regarded as a cellular-automata world with
turtles roaming around on top. Both the patches and the turtles have a
certain look, while the observer is invisible. Therefore it is like God,
you cannot see it but it is there in the heart of believers. The observer
is responsible for creating the turtles and patches and to monitor the
activities of the turtles and patches.
Figure 2
Three characters of StarLogo
StarLogo is a programmable
environment, and it provides a lot of procedures of patches / turtles
/ observer to build up various applications, for instance, for creating
turtles and defining the behaviour of turtles such as heading, movement
and so on; for statistical analysis involving arithmetic functions; for
visualisation like colour, data input / output and animation etc.. It also
allows users to develop their own procedures.
StarLogo language is a procedural
language, and each procedure fulfills certain functions. The basic syntax
is as follows:
<instruction> ::= <command-name> <expression>* | ( <command-name> <expression>* )
<expression>
::= <operation-name> <expression>* | <list> | <quoted-word>
| <number> |
<variable-ref> | ( <expression> )
<list> ::= [ <list-element>* ]
<quoted-word> ::= " <word>
<list-element>::= <list> | <word>
<word> ::= <string of characters other than space or [ or ]>
<variable-ref>::= : <word>
Except that there is also infix arithmetic
with + - * / = <
> in the usual way. Using
StarLogo, one can produce applications with a friendly Graphic User
Interface (GUI) linking to individual procedures, e.g. a button named "setup"
links to a procedure "to
setup". In the graphics window, one can watch the emerging
patterns. Thus StarLogo provides innovative computational tools for exploring
complex dynamic phenomena.
Now let's examine how StarLogo
fits into the basic principle of multi-agent simulations as described above.
First of all, turtles are the basic agents. In addition, breeds are alternative
agents in case more than one type of agent are needed. For instance, one
might want foxes and rabbits in an ecology model, or antibodies and antigens
in an immunology model. Secondly, objects in the StarLogo virtual worlds
are identified by the location (x, y).
Thirdly, patches are environments, which are usually identified by colours.
For instance, if a road is coloured by grey, it can be used to limit a
virtual pedestrian wandering around in the road. Finally, communications
are achieved through the procedure ask
(who, what), and they
occur between turtles, between turtles and patches, and between patches
and patches.
4.
A Representation of Urban Environments
The structure of the environment that agents live in is of importance
for studying self-organised patterns. Here an approach to the representation
of urban environments is presented by concentrating on open spaces. The
approach is termed as space syntax, which has a long tradition in urban
studies (Hillier and Hanson 1984, Hillier
1996). More recently it has been brought to the GIS community as the
potential for new functionality for spatial analysis (Jiang
1998, Jiang et al. 1999).
 |
 |
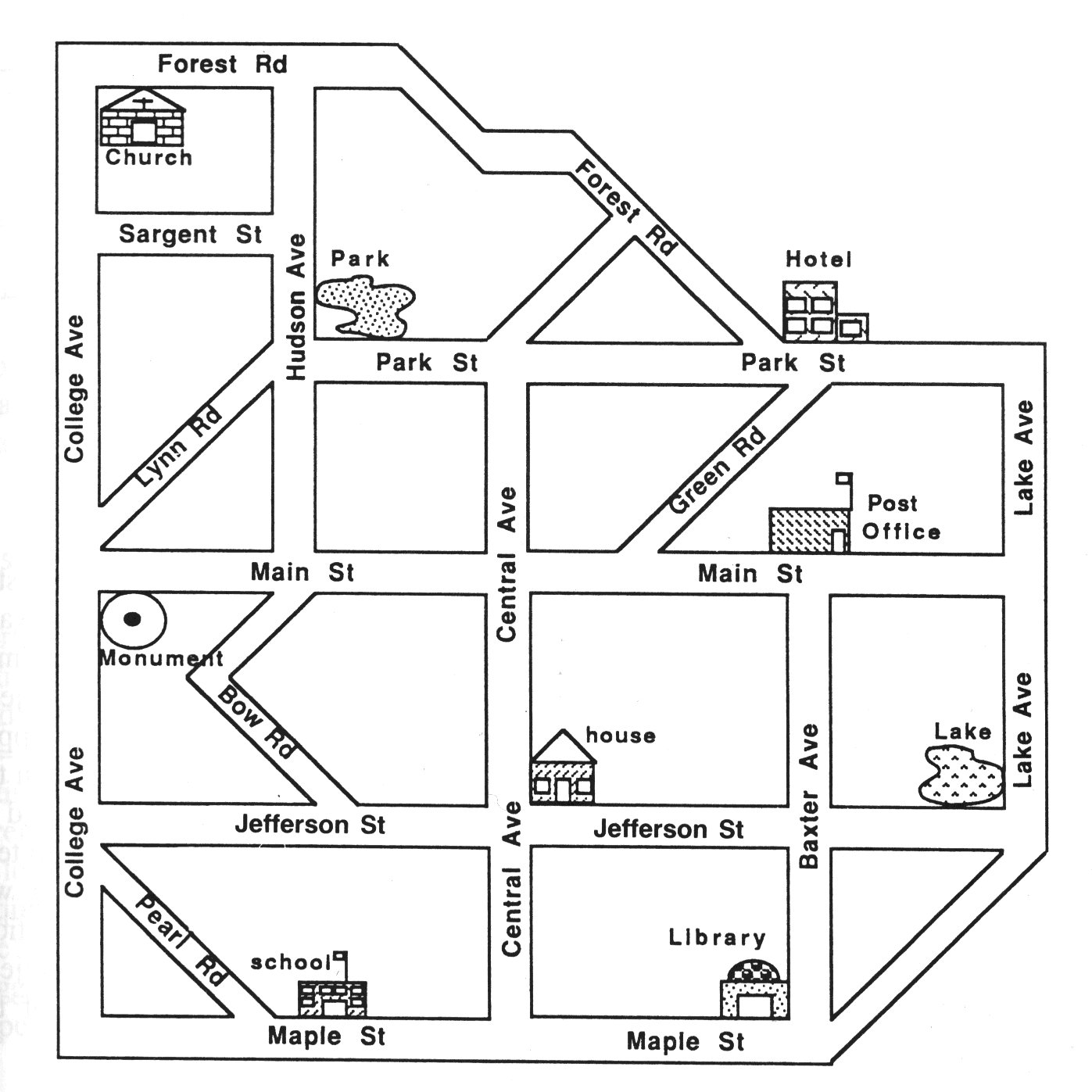
Having a look at the urban
system on the left in Figure 3, the open spaces are all
interconnected, and one can travel from any point to any other point. It
is this kind of characteristics that gives space syntax its unique position
in modelling urban environments. One of the space syntax approaches is
to represent open space as the longest straight lines. The whole urban
system is crossed with the least number of longest axial lines, producing
so called axial map (the model on the right in Figure 3).
Taking each street segment as a node and each intersection as the edge,
a related graph can be created. Based on the graph, a range of morphological
parameters are derived. Among others, the following are important:
- the connectivity Cj of
a line i is defined as the number of lines connected to that line. In the
derived graph, it is equal to the number of nodes directly linked to each
individual node;
- the control value crtli of a line i is defined as a measure
expressing the degree of choice each line represents for its immediate
neighbours as a line to move to, it is defined as
- the depth MDi of a line i measures its integration degree within the graph, it is defined as
- the last significant measure is integration. The integration of a line is a value which indicates the degree to which a line is more integrating, or segregating, from the system as a whole. It is measured with either Relative Asymmetry (RA), or Real Relative Asymmetry (RRA) as follows
where Dn is so called D-values, and it is the function of the number of space of a system.and
5.
SimPed: Simulating Pedestrian Flows in a Virtual Urban Environment
As mentioned, the basic hypothesis to test is whether morphological
structure has some impact on pedestrian movement in urban environments.
To achieve this goal, a virtual urban environment with virtual humans is
constructed using mulit-agent simulation. Such virtual worlds offer many
advantages (Resnick 1997). In virtual worlds
it is easy to create large number of virtual humans, it is easy to give
new sensory capabilities to the humans, and it is easy to set up and control
precise experiemental conditions.
In this particular virtual
world, a set of instances corresponding to the elements of multi-agent
simulations is designed (Table 1). Agents are
pedestrians with the behaviours of speed, heading and movement; objects
are churches, hotels, monuments, post offices etc.; the physical urban
space looks rather regular consisting of 21 streets as shown in Figure
3. The simulation (SimPed) is built upon StarLogo as introduced in
the previous section.
|
|
 |
The simulation consists of two parts as shown in Figure 4. The right hand is a graphic representation of the virtual urban environment, within which pedestrians are pictured as red. The left hand is the control panel. The setup button creates the number of pedestrians walking in the urban environment. There are two continuous walk button namely walk-randomly, and walk-purposely. These two buttons set two different modes of the simulation. The former is random movement, while the latter is purposing movement, which means pedestrians have set destinations to reach. In addition, a set of monitor tools are used to dynamically record pedestrians every moment in each street for analytical analysis. Behind what you see on the screen is a range of procedures which keep the simulation running. The following are some key procedures
to setup
die
setpedestrians
number
stopwalk-button
end
To check-no-kerb
if (pc-at dx
dy) > 6
[seth
(45 * random 8)
check-no-kerb
]
end
to move-pedestrian
if 0 = random
8
[set (45
* random 8)]
check-no-kerb
jump speed
end
to check-street1
output count-turtles-with
[(xcor
>= -33) and (xcor <= -31) and (ycor >= -33) and (ycor <= 33)]
end
to walk-randomly
ask-pedestrian
[move-pedestrian
wait
0.1]
end
to walk-purposely
ask-pedestrian
[ if who mod
9 = 1
[setheading
towards-nowrap -30 31]
;; to church
[ if who mod
9 = 2
[setheading
towards-nowrap 15 14]
;; to hotel
......
end
 Figure
5 Eight directions
Figure
5 Eight directions
For the random movement mode, it is set that each pedestrian is initialised to head in one of eight directions (Figure 5), in the street layout. Once pedestrians come to a street crossing, they randomly choose the next heading, which is one of the eight. The total number of pedestrians within the virtual urban environment is changeable using the scale bar for investigating the overall pedestrian pattern. This type of simulation is called the aimless pedestrian, for example tourists. The result of the experiment has turned out to have a significant correlation (Figure 6) between pedestrian movement rates and local integration obtained from space syntax analysis.
Figure
6 The regression plot between local integration
and pedestrian movement rates
For the mode of purposing movement, we have set all pedestrian destinations such as church, hotel etc.. The speed of each individual is set as a normal distribution, according to the existing observations on pedestrian movement (Helbing and Molnar 1997). However, it seems that there does not exist a significant correlation between pedestrian movement rates and local integration, particularly when time runs for a sufficiently long period. All pedestrians tend to cluster in their individual destinations (Figure 7). However, the final results seem not to be conclusive, as each pedestrian stops their journey once they have reached their destination. Further experiments are being carried out setting a range of destinations in a continuous course, that is, all pedestrians will continue their journeys with a further destination to reach, and thus they will never stop or cluster around certain locations.
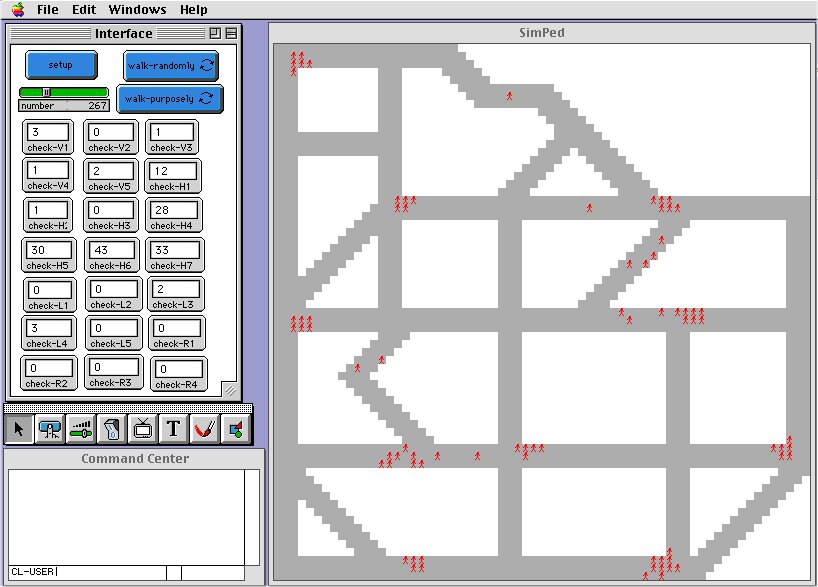
Figure 7 A snapshot of the simulation in progress (pedestrian moving purposely) |
Figure 8 A visibility
explorer
|
6.
Conclusions and Future Work
This paper discusses some results about the experiments for pedestrian
flows using a virtual urban environment. The experiments conducted are
useful to illustrate some assumptions about human behaviour in urban environments.
It has been shown that multi-agent simulation provides a valuable tool
for urban environment simulation. Particularly in the experiments reported
here, it has been found that urban morphological structures do have striking
impacts on pedestrian movement in urban environments although this needs
more work. Such simulations are useful for urban practitioners to assess
draft urban plans, and also valuable for psychologists and geographers
to study human behaviour in urban environments. The simulation capability
can be further incorporated into GIS to be a new functionality for dynamic
modelling.
The experiments so
far are based on a kind of local interaction, that is, the virtual pedestrians
can only see one step ahead. However, they clearly show that simple local
interactions lead to coherent patterns. From the point of view of modelling
human behaviour in an urban environment, the work is not sufficient. We
are carring on the work in attempt to give pedestrians a level of
global interaction. If pedestrians' sight is not limited to one step ahead,
there is move of a global sense. In this connection we have designed a
visibility explorer, with which one can explore visibility from any location
within the urban environment. In Figure 8, visible
sites from the mouse location are shown in white and the rests are shown
in grey. With the visibility explorer, visibility becomes a property of
each patch which can be transferred to pedestrians moving around. Thus,
pedestrians movement can be based not only on local interaction, but global
interaction as well.
References
Allen P. M. (1997), Cities and Regions as Self-organising
Systems: Models of Complexity, Gordon and Breach Science Publishers:
Amsterdam.
Batty M. and P. Longley (1994), Fractal Cities: A Geometry of Form and Function (San Diego: Academic Press).
Batty M., Dodge M., Jiang B. and Smith A. (1998), GIS and Urban Design, in Geertman S., Openshaw S. and Stillwell J. (eds.) Geographical Information and Planning: European Perspectives, in press, Springer-verlag, 32 pages.
Batty M. and Xie Y. (1997), Possible Urban Automata, Environment and Planning B, Vol. 24, No. 2, pp. 175-192.
Borgers A. and Timmermans H. (1986), A Model of Pedestrian Route Choice and Demand for Retail Facilities within Inner-City Shopping Areas, Geographical Analysis, Vol. 18, No. 2, pp. 115-128.
Drogoul A. and Ferber J. (1994), Multi-agent Simulation as a Tool for Studying Emergent Processes in Societies, in Gilbert N. and Doran J. (eds.) Simulating Societies: The Computer Simulation of Social Phenomena, University College London Press: London.
Helbing D. and P. Molnar (1997), Self-organisation Phenomena in Pedestrian Crowds, in Schweitzer F. (ed.) Self-organisation of Complex Structure: From Individual to Collective Dynamics, Gordon and Breach Science Publishers: Amsterdam.
Hillier B. (1997), Space is the Machine: A Configurational Theory of Architecture, Cambridge University Press: Cambridge.
Hillier B. and Hanson J. (1984), The Social Logic of Space, Cambridge University Press: Cambridge.
Jiang B. (1998), A Space Syntax Approach to Spatial Cognition in Urban Environments, Position Paper for NSF-funded research workshop on Cognitive Models of Dynamic Phenomena and Their Representations, October 29 - 31, 1998, University of Pittsburgh, Pittsburgh, PA.
Jiang B., Claramunt C. and Batty M. (1999), Geometric Accessibility and Geographic Information: Extending Desktop GIS to Space Syntax, Computers Environment and Urban Systems, forthcoming.
Minar N., Burkhart R., Langton C. and Askenazi M. (1996), The Swarm Simulation System: A Toolkit for Building Mulit-agent Simulations, http://www.santafe.edu/projects/swarm/.
Papert S. (1980), Mindstorms: Children, computers and Powerful Ideas, New York: Basic Books.
Resnick M. (1994), Turtles, Termites, and Traffic Jams: Explorations in Massively Parallel Microworlds, The MIT Press: Cambridge.
White R. and Engelen G. (1997), Multi-Scale Spatial Modelling
of Self-Organising Urban Systems, in Schweitzer F. (ed.) Self-organisation
of Complex Structure: From Individual to Collective Dynamics, Gordon
and Breach Science Publishers: Amsterdam.
